











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo

 Permalink
Permalink
Introducción
La hipoacusia neurosensorial profunda y el implante coclear
Se entiende con el término de hipoacusia neurosensorial profunda a la afectación, congénita o adquirida de diversa etiología, del receptor coclear o de la primera neurona auditiva lo que se traduce, del punto de vista clínico, en una discapacidad que dificulta significativamente la comunicación en las distintas etapas de la vida y que cuando se produce en forma congénita impide el desarrollo de lenguaje oral además de la imposibilidad de la audición de sonidos en todas sus variedades.
Hasta la década de los sesenta del siglo XX, la rehabilitación se enfocaba exclusivamente en el aprendizaje del lenguaje gestual en sus diversos modos, la lectura labial y una muy limitada ayuda de las audioprotesis convencionales para percibir ruidos de intensidad alta sin discriminación de los mismos. Es en esa década que comienzan los primeros intentos de sustitución del órgano dañado y sin función por una prótesis electrónica. Al final de la década de 1950 un grupo francés liderado por André Djourno y Charles Eyries, de Paris1, hace los primeros intentos de estimulación coclear con un electrodo, logrando la sensación de sonido en un número muy pequeño de pacientes con hipoacusia grave, luego de un tiempo el proyecto queda sin recursos y recién en mediados de 1960 un grupo de la ciudad de Los Ángeles, liderado por el Dr. William House2, comienza a tratar pacientes con hipoacusia profunda con implantes con un solo electrodo. Los resultados fueron también la percepción de ruido sin discriminación y ese proyecto tuvo un permiso limitado de la FDA en USA; pero los resultados no tuvieron otro impacto significativo en la comunicación humana. Recién en los comienzos de los años ochenta, en la Universidad de Melbourne, un grupo dirigido por el Dr. Clark3 desarrolla un implante con varios electrodos que se colocan en distintos lugares de la cóclea y que tenia, para cada electrodo, una distribución tonótopica de estimulación eléctrica que correspondía aproximadamente a la frecuencia de estimulación que esa zona coclear generaba al sistema nervioso central. Con esa estrategia se comenzó a tener resultados en la discriminación de la palabra y el implante coclear se transformo en la primera prótesis electrónica (y hasta ahora única exitosa de uso asistencial) capaz de sustituir un órgano sensorial. En toda esa década y hasta comienzos de 1990 se utilizaron en programas pilotos con restricciones en la indicación como herramienta terapéutica y a partir de 1995, luego de la Conferencia de Consenso realizada en Washington DC, se expande como indicación quirúrgica tanto para sordos profundos congénitos, que se denominan prelinguales, (porque su alteración sensorial se genera antes de que pudieran tener el desarrollo del lenguaje) como de postlinguales (aquellos que su sordera profunda se produjo luego de que hubieran desarrollado lenguaje independientemente de la etiología que la generó).
A partir de estos acontecimientos en la década de 1990 el implante coclear paso a ser una herramienta terapéutica de elección en el tratamiento de hipoacusias neurosensoriales profundas tanto en pacientes pre como postlinguales, y comienza a generarse numerosa información de los beneficios en la discriminación de la audición de la palabra y del desarrollo del lenguaje en ambos grupos4)(5)(6)(7)(8)(9.
Objetivos
Este reporte tiene como objetivo hacer una revisión y síntesis de los resultados experimentales realizados en el Laboratorio de Otoneurología (Hospital Británico, Montevideo), dirigidos a la evaluación del impacto que el implante coclear genera sobre el control motor del sistema del equilibrio, tanto el estático como son las estrategias de la postura erecta en el hombre, como el desarrollo dinámico de la marcha. Este aspecto ha sido menos explorado hasta ahora y tiene un interés primario en lo que hace al conocimiento básico, que intenta entender de qué manera puede la percepción del sonido mejorar una estrategia motora y también lo que tiene este punto de interés traslacional, por la eventual utilización que la estimulación acústica pueda tener en la neurorehabilitacion de lesiones motoras en el área del equilibrio.
El desarrollo motor en el sistema del equilibrio
El desarrollo motor humano es un proceso que cursamos a través de toda nuestra vida e involucra todos los cambios que ocurren en nuestra capacidad de movimiento y nuestro movimiento en general. Ese proceso no solo es relevante en el neurodesarrollo, en la infancia y adolescencia, sino también a las alteraciones que se producen vinculadas a los procesos de envejecimiento en el adulto mayor.
Básicamente, comprender el desarrollo motor implica un abordaje múltiple, por su estrecho vínculo con los desarrollos cognitivo, sico-emocional y social10.
El proceso de desarrollo motor usualmente se clasifica en dos grandes grupos; los cambios en los movimientos gruesos en el que ubican la musculatura de mayor tamaño, que participan en los movimientos de tronco y miembros, y los movimientos finos que representan los movimientos vinculados a destrezas más complejas como la escritura, dibujo, la ejecución musical y tareas similares. Sin embargo, la realidad muestra que aún para movimientos finos se necesitan algunos movimientos más gruesos que condicionan a los de mayor precisión. Por ejemplo, en la escritura donde el antebrazo y brazo necesitan ciertos movimientos gruesos en la fijación del miembro superior para que la mano pueda realizar las acciones finas y precisas necesarias.
El desarrollo de lo que se entiende como el equilibrio humano consta de dos acciones básicas, el control postural y la marcha en la que participan movimientos gruesos y también finos, fundamentalmente cuando se necesitan precisiones en esa ejecución motora, que son necesarios por cambios en las condiciones en donde se desarrollan.
El control postural, que en esencia es la capacidad de mantener la posición bípeda y también la marcha, depende esencialmente para su desempeño de la información sensorial, por lo que ambos deben considerarse sistemas sensorio-motores por excelencia.
En lo que respecta al control postural y la marcha, tres tipos de receptores sensoriales están básicamente involucrados en su performance: la visión, los receptores vestibulares del oído interno y la información propioceptiva, encargados de generar la información necesaria de la posición del propio cuerpo y sus respectivos segmentos como así también y de manera relevante todo lo que se relaciona con el medioambiente que lo relaciona. En esta revisión vamos a introducirnos en entender también la participación de un receptor sensorial como la audición, considerado tradicionalmente sin influencia en la postura bípeda y la marcha, pero que, a través de la evaluación en pacientes con sordera profunda e implantes coclear, se puede discriminar el rol potencial de la audición en el control motor de estas funciones.
La manera de analizar su comportamiento hace necesario considerar un modelo teórico, que explique la correlación de los sensores entre si y de ellos con la ejecución de las acciones motoras necesarias para controlar una postura y marcha adecuada.
La información sensorial y el control motor
La mayoría de los movimientos están influenciados por la información sensorial y el problema es determinar cómo se combina la entrada sensorial con el control central y su posterior ejecución mecánica. En un sistema sensorio-motor se puede considerar que la información sensorial periférica tiene tres funciones:
Control postural
Modelo teórico de control postural
Desde el punto de vista teórico, el control postural funciona como un modelo de péndulo invertido cuya oscilación está determinada por los movimientos de la articulación del tobillo. Se trata de un sistema de control realimentado. Este sistema se compone de la interconexión de varios bloques funcionales. Primero, un bloque que representa al cuerpo humano en su modelo biomecánico. Además, un bloque sensorial, que proporciona información posicional del cuerpo, basada en la visión, los receptores vestibulares y la información propioceptiva y de manera complementaria como veremos con la auditiva.
Finalmente, un bloque que actúa como “controlador” y que representa el trabajo del sistema nervioso central (SNC), donde los núcleos vestibulares, distintas regiones del cerebelo, varias estructuras de los núcleos de la base, fundamentalmente los núcleos estriado y putamen y por ultimo estructuras fronto-parieto cortico-subcorticales son las involucradas de establecer estrategias de control motor, que tienen como objetivo colocar la proyección vertical del centro de masa corporal (CM) dentro de la denominada base de soporte, representada por la envolvente del área delimitada por el contorno de los pies.
Esta estructura se dice que constituye un sistema de control en lazo cerrado porque la información sensorial, proveniente del movimiento real del cuerpo es utilizada por el SNC para generar los movimientos apropiados para cumplir la tarea asignada compensando los errores cometidos por las acciones anteriores o las perturbaciones encontradas que alteraron el movimiento anterior.
Por lo tanto, cuando se produce la oscilación del CM generada en la articulación de tobillo dentro de la base de soporte, esa oscilación corporal es nuevamente evaluada como “señal de error” por los sensores y llevada nuevamente para que el SNC como controlador corrija los desvíos en esa oscilación que puedan generar la pérdida de la posición bípeda y la caída (Figura 1).
Figura 1: Modelo teórico de control postural. El control de la postura funciona como un sistema de lazo cerrado en el que el objetivo es colocar el CM del cuerpo dentro de la base de soporte que esta representada por el perímetro delimitado por ambos pies. La información sensorial es llevada al SNC que establece las estrategias motoras para que el CM siempre oscile dentro de esa base de soporte. Esa posición y oscilación constante del CM es tomada nuevamente por los receptores sensoriales como “señal de error” y reprocesada por el SNC para las correcciones necesarias. De esta manera se establece un flujo de información constante para que la posición del CM sea evaluada y recorregida por el controlador del sistema (SNC) con el fin generar respuestas motoras que mantengan ese CM oscilando dentro de esa base de soporte del sistema.
Evaluación del control postural
Al tener el comportamiento físico de un péndulo invertido, el cuerpo humano en posición bípeda oscila, como se expreso anteriormente, por la articulación de tobillo con movimientos de amplitud y velocidad variable lo que genera la posibilidad de tener dos parámetros de evaluación, la amplitud de oscilación del CM, que al cabo de un tiempo de segundos marca un área delimitada en que ese CM oscila. Convencionalmente en inglés el tamaño de esa área de oscilación se denomina COP (Centro de Presión de la masa corporal) y es registrada con plataforma de fuerza. La velocidad en que ese CM oscila es otro parámetro que se utiliza para evaluar el sistema y se le denomina convencionalmente SV como abreviatura en ingles de Sway Velocity. El COP se mide en cm2 y la SV en grados/segundo y se puede medir usando los valores de una plataforma de fuerza en que se debe ubicar la persona en posición erecta registrando la oscilación del péndulo a través de los sensores que son celdas de carga (como las utilizadas por las balanzas electrónicas). Estas registran los movimientos del péndulo porque son estructuras diseñadas para soportar cargas de comprensión tensión y flexión y registrar los valores de estas deformaciones. Otro modo de evaluar la oscilación de la masa corporal es con acelerómetros colocados en distintas partes del cuerpo (hombros, espalda, región retrosacra y miembros inferiores. En este caso los acelerómetros registraran las oscilaciones del centro de masa corporal generando también medidas de su área y su velocidad.
Tanto sea de una manera u otra de registrar la oscilación corporal a mayores valores de área y de velocidad, mayor será la inestabilidad en el control motor de la postura.
Por último, colocando marcadores en distintas partes del cuerpo, los sistemas de captación de imagen por cámaras es el otro método utilizado para evaluar las estrategias de la función motora y que permite una segmentación de los movimientos de cabeza, tronco y miembros dando información sobre la cinemática del control motor fundamentalmente en la función de la marcha.
Medición alternativa del control postural
La señal COP registrada por la plataforma de fuerza, puede ser analizada midiendo el consumo de energía (CE) que genera. El CE del COP toma en cuenta el desplazamiento espacial de esta señal, que representa las variaciones de energía potencial y también las velocidades de oscilación (SV) que miden energía cinética, por lo que considera ambos parámetros, COP y SV en forma simultánea. Se debe remarcar que este CE esta generado por la oscilación de la señal COP que se registra en la plataforma, que aunque relacionado, no representa de manera directa un consumo de la energía de la estructura corporal del paciente evaluado. En el laboratorio de Otoneurología se desarrollo un sistema de procesamiento11 que permite su utilización para la evaluación del control motor de la postura tanto en investigación como en la práctica clínica. El cuerpo humano en posición erecta oscila en un rango de 0 a 2 Hz en su contenido de frecuencias dominantes y el consumo de energía de esa oscilación del CM puede generarse en dirección de las frecuencias más lentas o las más rápidas de acuerdo a situación funcionales o patológicas. En el cálculo del CE se toman las direcciones de oscilación antero-posterior y medio-lateral del registro en una plataforma de fuerza usando un muestreo de 50 Hz durante 30 segundos, y los valores medios se restaron y el valor absoluto del vector velocidad de balanceo se estimo numéricamente como:

Donde SV es la velocidad de oscilación VO y el algoritmo de transformada rápida de Fourier (FFT) se aplicó a la señal de SV discreta para estimar su contenido de frecuencia, dado por:

El contenido de energía de la señal SV en el rango de frecuencias entre f_1 y f_2 se calcula como:

Se seleccionaron tres rangos de frecuencias para investigar la energía gastada en la actividad, un rango bajo entre 0 y 0.1 Hz, un rango medio entre 0.1 y 1 Hz y un rango alto entre 1 y 2 Hz. Las frecuencias más altas no son posibles de discriminar debido al teorema de muestreo, pero son despreciables para esta tarea.
Esta manera de evaluar el control motor de la postura permite tomar en consideración todo el fenómeno en sus componentes de frecuencias, bajas y altas y por lo tanto poder facilitar la caracterización del sistema.
El CE aumenta en situaciones en que la persona tiene alteraciones de su equilibro corporal y se puede conocer en qué orden de frecuencias la señal de oscilación del CM consume más energía lo que puede ser significativo en el momento de planear un programa de rehabilitación. Por ejemplo, en patología cerebrovascular en el adulto mayor el CM consume más energía en los rangos de frecuencias más bajo como la banda entre 0 - 0,1 hz2 y en hipofunciones de los receptores vestibulares el CE migra a frecuencias mayores (Banda 3=1-2 hz.)12.
Conceptualmente entonces, el mayor consumo de energía total de la señal de CM traduce más inestabilidad de la persona y la discriminación de ese consumo en una de las bandas establece la caracterización para el sistema de control de la señal de error.
En esas frecuencias es donde fundamentalmente se generarán los ajustes posturales (Figura 2).
Figura 2: En el sistema de control postural, la salida del mismo representada por la posición del CM oscila en un rango entre 0 y 2 Hz, información tomada nuevamente como “señal de error del sistema” por los receptores sensoriales que en el modelo propuesto “ajustan” la ganancia de esa señal en el rango de las frecuencias más lentas (0-0,1 Hz), medias (0,1-1 Hz) y rápidas (1-2 Hz). Como se presenta en los resultados las frecuencias lentas y las más rápidas son las que ajustan más significativamente esos valores a fin de adaptar una salida del sistema adecuada, lo que se traduce en un constante ajuste de la posición del CM.
La información sensorial y el control motor de la postura
Es bien conocida la significación de los tres receptores que dan la información más relevante para el control motor en el sistema del equilibrio humano, visuales, vestibulares y propioceptivos. La posibilidad de estudiar pacientes con sordera neurosensorial profunda, (del punto de vista práctico sordera absoluta) en los que se los rehabilito con un implante coclear habilitando la información acústica, permitió estudiar las estrategias motoras de la postura en presencia o ausencia de audición.
El control postural como parte del proceso de neurodesarrollo y la audición
Desde el nacimiento hasta los 8 años se producen aceleradas modificaciones en el control motor en las primeras etapas para mantener el control de la cabeza y el tronco y luego el desarrollo de las distintas estrategias que exige la posición erecta y el posterior desplazamiento de la masa corporal en los mecanismos de la marcha siempre en una relación intima de competencia con las fuerzas gravitacionales.
En estos primeros 8 años se procesan los cambios más significativos en el desarrollo de estas destrezas motoras lo que ha sido ampliamente descrito10. Sin embargo estos cambios siguen produciéndose en el resto de la adolescencia de una manera más discreta, pero con impacto en todo el proceso de desarrollo de habilidades motoras.
Este estudio describe los resultados experimentales en la evolución del control postural y de la performance de la marcha en pacientes con sordera profunda usuarios de implante coclear (UIC) en los dos períodos de la vida en que se producen cambios de significación, como son la adolescencia y en el adulto mayor, en los rangos de edad en que se producen fenómenos de envejecimiento que alteran distintas ejecuciones motoras.
Población evaluada
El control motor de la postura y de la marcha se estudió en 34 pacientes UIC unilateral, 17 adolescentes portadores de hipoacusia profunda prelingual (congénita) y otros 17 adultos también con las mismas características, pero en los que la indicación de implante coclear se estableció por la presencia de una hipoacusia neurosensorial profunda postlingual (adquirida). El rango de edad de los adolescentes prelinguales fue entre 12-18 años y el de los adultos postlinguales fue entre 40-79 años.
El objetivo principal del estudio fue cuestionarse si la información acústica juega algún rol en el control motor de la postura bípeda y la marcha en estos pacientes, por lo que estas funciones motoras fueron analizadas con el implante prendido (ON) y con el implante apagado (OFF) y en este caso sin recibir ningún estimulo acústico.
Todo el diseño experimental fue sometido al tribunal de ética del Hospital Británico y cada paciente y su familia dispusieron de un consentimiento informado acerca de las características, fines de la evaluación y ausencia de riesgos.
Método de análisis del control postural
Se midió el control postural midiendo el comportamiento del centro de presión de la masa corporal (COP) en una plataforma de fuerza, cuantificando el CE de esa señal como se describe en forma previa. Se evaluó el control postural colocando al paciente en posición erecta sobre la plataforma de fuerza durante 60 segundos en 2 condiciones sensoriales: 1- de pie con ojos abiertos y el implante prendido (ON), 2- de pie con ojos abiertos y el implante apagado (OFF).
Método de análisis de la performance de marcha
El desarrollo de las habilidades motoras para establecer una marcha en posición erecta tiene, en relación al neurodesarrollo, una primera etapa en los dos primeros dos años de vida de cambios rápidos que llevan desde la posibilidad de sostener la cabeza en los primeros meses de vida, luego el tronco, posibilidad de sostener la posición bípeda primero con ayuda y luego cada vez más independiente. En el período entre los 2 y los 8 años se completan muchos de los aspectos esenciales del comportamiento motor y luego, entre los 8 y 18 años10 es un tiempo donde se terminan de desarrollar los aspectos más finos en la estrategia motora de la marcha, como también sucede en otras habilidades motoras.
En este estudio se analizó la marcha en los pacientes adolescentes prelinguales con el test de los 10 m13 que es el más validado para estos fines. Se exploró la velocidad de la marcha automática o espontánea en este trayecto a través de un registro generado por tres acelerómetros, dos colocados en el dorso de cada pie y el tercero en la región sacra ajustado por un cinto previamente diseñado para este test (Figura 3).
Figura 3: Esquema con la posición de los acelerómetros que registran la posición de masa corporal, y posición de ambos miembros inferiores de donde se calcula la velocidad de la marcha.
Se midió esa velocidad de la marcha automática (VM) en tres condiciones:
A - con el implante ON, percibiendo ruido ambiente en un rango de 50-60 dbs;
B - el implante OFF en que tenían ausencia de información acústica y C - con el implante ON ruido ambiente y realizando una tarea doble simultánea de carácter cognitivo (TD), en la que mientras caminan deben decir en voz alta los meses del año (en sentido inverso). Esta condición C se establece ya que la velocidad de la marcha cuando la persona realiza una tarea cognitiva simultánea se enlentece normalmente, hecho que en el adulto mayor es de mucha significación para aumentar los riesgos de inestabilidad y generación de mecanismos de caída. Las condiciones A y C fueron comparadas con un grupo control del mismo grupo etario y normoyentes, excluyendo por razones obvias la condición B de anacusia.
Análisis estadístico: Se utilizaron las pruebas de Wilcoxon y Mann-Whitney y el nivel de significación fue p = 0.05.
La información acústica y el desarrollo del control motor de la postura erecta en la adolescencia y su relación con el implante coclear
El desarrollo del control postural y marcha se va produciendo de manera significativa en los primeros 8 años de vida donde se adquieren estrategias motoras fundamentales para estas funciones. Sin embargo, durante la adolescencia siguen produciéndose fenómenos de adaptación y como puede observarse en la regresión de la Figura 4, el control motor de la postura bípeda va disminuyendo los valores de CE que traduce que el sistema de control oscila menos a medida que aumenta la edad como expresión de un proceso adaptativo en el neurodesarrollo. En estos adolescentes con sordera profunda esa adaptación del control motor en la postura, evaluados entre los 12 y 18 años, es significativo cuando reciben información acústica (Implante ON) p=0.009 y por el contrario no lo es cuando son evaluados en el silencio de su hipoacusia neurosensorial, p=0.89.
Figura 4: Evaluación del control postural a través de regresiones de los valores de CE en pacientes con hipoacusia profunda y UIC en distintas edades de la adolescencia (10-18 años). A la izquierda se observa la evolución del CE del COP con el implante apagado y por lo tanto sin recibir información acústica (OFF), donde no tiene cambios de significación, p=0,89. En cambio cuando tienen el implante funcionando y recibiendo información de ruido ambiente se observa un descenso del CE del COP a medida que se registran edades mayores, p=0,009, lo que traduce un ajuste adaptativo en ese período etario utilizando la información acústica.
El descenso significativo en el CE de la señal COP en el transcurso de la adolescencia traduce un ajuste del control postural en este período del neurodesarrollo y estos hallazgos muestran un rol de importancia en la información acústica. Cuando no está habilitada esta información este ajuste en este período etario no alcanza niveles de significación, hecho que cambia cuando estos mismos pacientes se estudian usando la audición a través del implante coclear en que disminuyen los valores de ese CE y por lo tanto mejoran su performance motora para mantener la postura bípeda. Mirando estos resultados bajo las reglas de análisis de un sistema de control en ingeniería biomédica, el sistema necesita menos información para mantener su objetivo, que en este caso es colocar el centro de masa corporal dentro de la base de soporte del individuo establecido por el área que delimitan los bordes de ambos pies.
Cuando discriminamos por bandas de frecuencia (Figura 5) se destaca que el ajuste con la implementación de información acústica se genera en los extremos del rango de frecuencia de oscilación de la masa corporal que son las bandas 1 y 3 que representan los rango entre 0-0,1 y 1-2 Hz respectivamente no presentando modificaciones significativas el rango de frecuencias medias (0,1-1 Hz). Este fenómeno es razonable explicarlo porque estas frecuencias de las bandas 1 y 3, representan el ajuste de movimientos gruesos y finos necesarios para la mayoría de las acciones motoras y en este caso para ajustar un control postural adecuadamente. Conceptualmente se puede sugerir que la información acústica colabora en este “ajuste motor adaptativo” de una manera eficaz sugiriendo que el conocimiento de cómo se caracteriza ese ajuste en esa relación entre del rol de la información auditiva y de las frecuencias relevantes involucradas, debería considerarse en niños o adolescentes que requieran rehabilitación motora en ese período de su vida.
Figura 5: Regresiones con los valores de CE del COP en pacientes con hipoacusia profunda y UIC en distintas edades de la adolescencia. En las tres presentadas arriba en las que los valores de CE son registrados estando los pacientes con el implante apagado (OFF-sin información acústica) no hay modificaciones significativas a través de ese período de la vida, p>0,05 en las tres bandas de frecuencias. En las tres presentadas abajo se ve que hay una disminución significativa del CE del COP a en los adolescentes de mayor edad en las frecuencias lentas (Banda 1- 0-0,1 Hz, p=0,016) y en las rápidas, (Banda 3, 1-2 Hz, p= 0,005), no mostrando cambios significativos en las frecuencias medias (Banda 2-0,1-1 Hz, p=0
La información acústica y el control postural en el adulto con hipoacusia neurosensorial profunda usuarios de implante coclear
Se evaluó el control postural en adultos con hipoacusia neurosensorial profunda postlingual o adquirida en las mismas dos condiciones sensoriales que los adolescentes. En la regresión de la Figura 6, a partir de los 40 años en el control postural el CM corporal comienza a oscilar más y por lo tanto la señal COP aumenta el CE a medida que se va midiendo a pacientes con mayor edad cuando se evalúan con el implante OFF por lo tanto en situación de “silencio”. En cambio, cuando los mismos pacientes se les mide el control de postura con el implante ON la regresión muestra un comportamiento homogéneo sin variaciones significativas, con valores similares en las distintas edades evaluadas. Esto traduce que en el caso de los adultos especialmente en los que superan los 60 años de edad la información acústica comienza a ser relevante para desarrollar una estrategia motora adecuada para mantener la postura.
Figura 6: Regresiones con los valores de CE del COP en adultos en un rango de edad de 40-80 años, con sordera profunda adquirida y UIC. Arriba están tomados los valores de CE cuando tienen el implante apagado (OFF) en donde con el paso de los años los de más edad tienen valores mayores de CE que traduce mayor inestabilidad del sistema, p=0,05. En cambio, cuando son registrados usando el implante y recibiendo información acústica (ON) los de mayor edad no tienen valores de significación, p= 0,81
Estudios longitudinales en adultos mayores han demostrado que valores descendidos de los umbrales de audición relacionados con presbiacusia en ese rango etario aumentan el riesgo de inestabilidad y caídas como así también un mayor riesgo de desarrollar déficit cognitivo más significativos14)(15)(16. Estos hallazgos han inducido a generar protocolos de equipamiento auditivo de manera más precoz en personas en este rango etario que tienen descenso de los umbrales auditivos. En el déficit de información de los receptores auditivos y vestibulares, a través de estudios de imagen funcional, se han descrito disminución de la masa neuronal del hipocampo17. Dado los resultados experimentales descritos en este estudio y hallazgos de otros estudios referenciados previamente, se puede establecer que el rol de la información acústica no es neutral como fuente de referencia, para el desarrollo de una estrategia motora correcta en el mantenimiento de la postura erecta. Fenómeno que es válido para diferentes etapas de la vida, como se ha descrito, tanto en adolescentes como en adultos mayores. Estudiar estos fenómenos en pacientes sordos profundos con implante coclear, genera la posibilidad de evaluarlos, con respecto a la entrada auditiva, en una condición sensorial de todo-nada o ruido-silencio, situación que no es posible en personas con umbrales de audición normales.
La performance de la marcha en implantados cocleares en la adolescencia
La marcha humana es un proceso en el que el cuerpo humano en posición erecta se mueve sostenido en forma sucesiva por ambas piernas, en donde hay un miembro inferior que actúa como soporte y el otro se balancea en la dirección del paso preparando el siguiente apoyo.
Por lo tanto, hay un período en que el cuerpo es soportado por un miembro inferior y otro de transición breve en que ambos pies están apoyándose y soportando el peso corporal. Este período de ambos pies apoyándose simultáneamente se le denomina “doble estancia” que tiene una evolución según la velocidad de la marcha, dado que si la marcha es muy lenta ese período será más extenso y a medida que la velocidad aumenta ese período es cada vez más breve hasta que se pasa del rango de marcha a correr en que puede haber períodos, también breves, en que ambos pies están en el aire.
Son variados los parámetros de la evaluación de la marcha que pueden establecerse, sobre todo si se hace un abordaje acerca de la cinemática en donde es fundamental para explorar un paciente con alteraciones músculo-esqueléticas que le alteran la marcha. Son algunos de ellos:
El largo de la zancada ―la fase de apoyo (que constituye el 60 % del ciclo de la zancada-fase de oscilación ― el comportamiento del eje del cuerpo, la pelvis y de los distintos componentes de los miembros inferiores, rotación de las distintas articulaciones y otros muchos que están destinados a estudiar los aspectos cinemáticas de la marcha y que son de especial interés en los procesos de rehabilitación motora18)(19.
Sin embargo, velocidad de la marcha es un parámetro que resume muchos de los otros componentes de la marcha y si el foco de interés es entender su performance motora, hay una marcha que se puede denominar espontánea en que el individuo camina sin condicionamientos de tiempo establecido y que la velocidad a la que se ejecuta es una referencia en la evaluación de la habilidad en la ejecución motora20)(21. La evaluación de la marcha espontánea en esta población de niños sordos profundos rehabilitados con implante coclear y se les compara con niños normoyentes, mostró que como es fisiológico, en estos últimos la tarea cognitiva simultánea (TD) les enlentece la velocidad p<0,05 comparada con la performance analizada solo con ruido ambiente. Sin embargo, en los UIC la velocidad de marcha no presentó diferencias significativas tanto fueran analizados con el implante ON y ruido ambiente como si se le agregaba una DT cognitiva. Por el contrario, la velocidad de marcha con el implante OFF por lo tanto en situación de silencio absoluto la velocidad aumentaba significativamente p<0,05 con respecto a las dos previas condiciones sensoriales. Este disminución en la velocidad de la marcha condujo a sugerir que la implementación de información acústica, aún si otra actividad simultánea genera un comportamiento de tarea dual alterando una ejecución motora, en este caso enlenteciéndola, hecho que se corregía cuando se media en condición de silencio absoluto (Implante OFF)(Figura 7).
Conceptualmente, solamente la percepción de ruido ambiente sin tarea cognitiva asociada (TD) produjo un deterioro de la calidad de la marcha, enlenteciéndola.
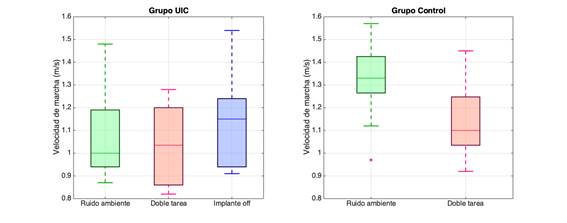
Figura 7: Los Box Plot muestran los valores de adolescentes, con hipoacusia profunda congénita prelingual y UIC. A la izquierda en las tres condiciones sensoriales evaluadas, (Implante ON, ruido ambiente y doble tarea e implante apagado-OFF), en donde se observa que la velocidad de marcha espontánea es más rápida cuando no tienen información acústica. A derecha los valores del grupo control de adolescentes con audición normal en dos condiciones con y sin doble tarea cognitiva, en el que presentan un descenso de la velocidad de marcha con la doble tarea, lo que es un fenómeno fisiológico.
Con el objetivo de discriminar estos resultados se dividió la población en los adolescentes que fueron implantados antes de los 3 años y los que fueron implantados luego de esta edad. El fundamento de esta segmentación para analizar el comportamiento de la marcha esta basado en que esta admitido que en los resultados en la percepción de audición y en la generación de lenguaje, hay una diferencia significativa en la implantación precoz (1-3 años de vida) de un niño sordo profundo congénito. Esta implantación precoz posibilita un producción de lenguaje comparable a un niño normoyente y que más allá de este lapso esta capacidad va disminuyendo con las consiguientes limitaciones en la comunicación oral23)(23)(24)(25)(26.
Los resultados en la Figura 8 muestran que los UIC implantados antes de los 3 años de vida tenían un comportamiento similar a los niños normoyentes de control donde el implante ON con ruido ambiente no les alteraba la ejecución motora de la marcha y esta solo se enlentecía cuando se evaluaba con TD que es un comportamiento fisiológico. En cambio, los UIC implantados más tardíamente tenían diferencias significativas con los precozmente implantados p<0,05 alterándose en ellos la marcha solo con estar sometidos a ruido ambiente, lo que conceptualmente significa que en estos niños implantados tardíamente “oír” es una doble tarea comparable a la realización simultánea de una tarea cognitiva.
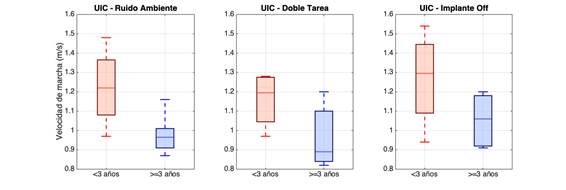
Figura 8: Se presentan los valores de velocidad de marcha en las tres condiciones evaluadas en el grupo de adolescentes con hipoacusia profunda e UIC, pero separados en los implantados antes y luego de los 3 años de edad. Los Box PLot muestran que la velocidad de marcha espontánea es mayor p=<0,05 en todas las condiciones en los que el implante coclear se implemento antes de los 3 años de vida. Este grupo tiene valores similares a los del grupo control de adolescentes con audición normal
La interpretación de estos hallazgos está directamente vinculados con lo descrito por Jean Piaget en lo que denominó período sensoriomotor27)(28 que transcurre entre el nacimiento y los dos años de vida y en donde se genera los fenómenos de interacción fundamentales entre la información sensorial y la ejecución de distintas acciones motoras que luego de ese período estarían más limitadas en su coordinación.
Conclusiones
El sistema del equilibrio en el hombre, que permite el mantenimiento de una posición erecta necesaria para sus funciones de relación medioambiental y su desplazamiento, es determinante en la vida de relación; está compuesto por un sistema de control de lazo cerrado (Figura 1) en el cual la información sensorial fundamentalmente proveniente de los receptores, visual, vestibular y propioceptivo, es llevada al controlador del sistema que es representado por distintas estructuras del sistema nervioso central destinadas a la coordinación de esta información y ejecutar el control motor tanto en la postura erecta como en los mecanismos de la marcha. La coordinación sensorio-motora está destinada a un conjunto numeroso de funciones que conceptualmente en una forma de síntesis pueden dividirse en:
A- las destinadas a estabilizar la imagen en la retina cuando los objetos se mueven, el sujeto se mueve o ambos eventos suceden simultáneamente, y que está representada por numerosos reflejos (Vestíbulo oculomotores, vestíbulo cólico, visuo-vestibulares, etc.) por lo que es una función fundamental para la relación con el medio.
B- Las destinadas a mantener la posición bípeda, controlando la posición de cabeza, tronco y miembros, representados por múltiples reflejos vestíbulo-espinales que actúan tanto en el rango estático del control de la postura como en el dinámico de la marcha, siempre en competencia con la presión gravitatoria en base a una actividad funcional permanente del sistema musculo-esquelético de esas estructuras corporales.
Este estudio del sistema del equilibrio en pacientes UIC estuvo destinado a intentar entender el rol de la información acústica en un modelo de análisis que permite comparar la performance con percepción acústica y en silencio absoluto. Estos hallazgos experimentales permitieron establecer algunos puntos básicos en el problema de la relación entre la entrada de información acústica en el control motor del equilibrio.
1. La información acústica no es neutral en las performances motoras tanto en el control postural como en la ejecución de la marcha.
2. Fundamentalmente en la marcha hay una correlación temporal en las etapas del neurodesarrollo, siendo crucial el período de cuando un ser humano comienza a recibir información auditiva en este proceso y la relación directa con la adquisición de determinadas habilidades motoras, como se observó en la medición de la marcha espontánea, hecho que puede enmarcarse en los fenómenos que Piaget estableció como período sensoriomotor correspondientes a los dos primeros años de vida.
3. Medida la performance motora en el control postural a través del modelo presentado y la medición del consumo de energía de la señal COP, la entrada de información acústica modifica las frecuencias extremas del sistema (Banda 1 y 3) disminuyendo los valores de este consumo en las mismas a través del transcurso de la adolescencia lo que traduce un ajuste adaptativo de la postura erecta.
4. El hecho que las bandas de frecuencias que hacen ese ajuste sean las más lentas y las más rápidas del rango de frecuencias involucradas en la oscilación del eje de la masa corporal, deben relacionarse a que en la precisión de todas las funciones motoras de una persona hay:
A) un movimiento grueso que es vinculable a las frecuencias lentas, y que generalmente condicionan la “precisión” de una función motora.
B) Un movimiento fino que es relacionable a las frecuencias de la banda alta que definen esa precisión.
Como se puntualizó anteriormente esta relación entre movimientos gruesos y finos es fácilmente comprensible en la ejecución de un instrumento musical, la escritura etc., con distintas características esa coordinación entre estos dos tipos de movimientos, se da en la mayoría de las funciones motoras del ser humano y también en el sistema del equilibrio.
Hay información acerca de modificaciones estructurales que la información acústica genera en estructuras del sistema nervioso central29)(30)(31)(32)(33, y con un criterio traslacional, esta relación entre información acústica y performance en el control motor del equilibrio sugiere que puede ser utilizable en el diseño de intervenciones de rehabilitación, como las utilizadas en distintas patologías congénitas o adquiridas, neurológicas o musculo-esqueléticas.
Ya se ha comenzado a incorporar la utilización de claves acústicas en rehabilitación de algunas patologías neurológicas como entre otras en la enfermedad de Parkinson34)(35)(36, la utilización de modelos comportacionales teóricos pueden permitir generar estímulos con las características en amplitud, frecuencia, intensidad, etc. que sean los más adecuados para generar correcciones adaptativas del control motor37)(38)(39.
Por último, convendría destacar que nacer con la discapacidad que genera una hipoacusia neurosensorial profunda bilateral, sin duda tiene el impacto mayor en el desarrollo de instrumentos esenciales en la comunicación como es el desarrollo de lenguaje de ejecución oral, pero también con un impacto más “oculto” o subclínico , como es la afectación de estrategias en el control de las distintas performances necesarias en el sistema del equilibrio básicas en las funciones de comunicación en el ser humano.
Tanto en los procesos vinculados en la producción de lenguaje oral y como en la optimización del control motor del sistema del equilibrio, fundamentalmente en niños con patología sensorial congénita, deberá considerarse un criterio de “precocidad temporal” en la implementación de intervenciones de rehabilitación. El tiempo establecido como de integración sensoriomotora en los primeros dos años de vida parecen ser el período crítico en el cual los fenómenos de integración y aprendizaje logran establecerse de manera adecuada.

